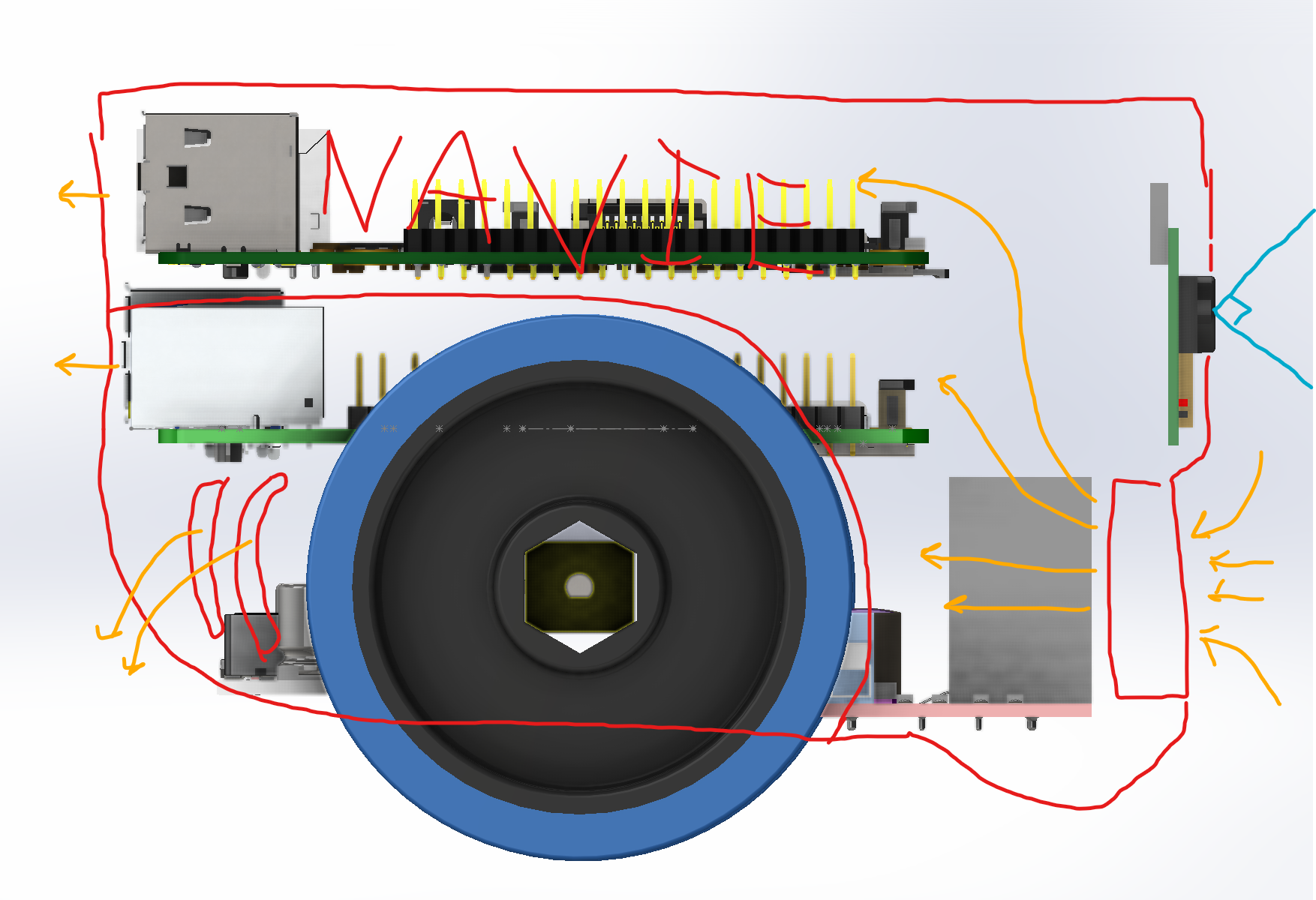
Navie
A little robot that navigates entirely on its own. Hence the name, Navie.
About the project
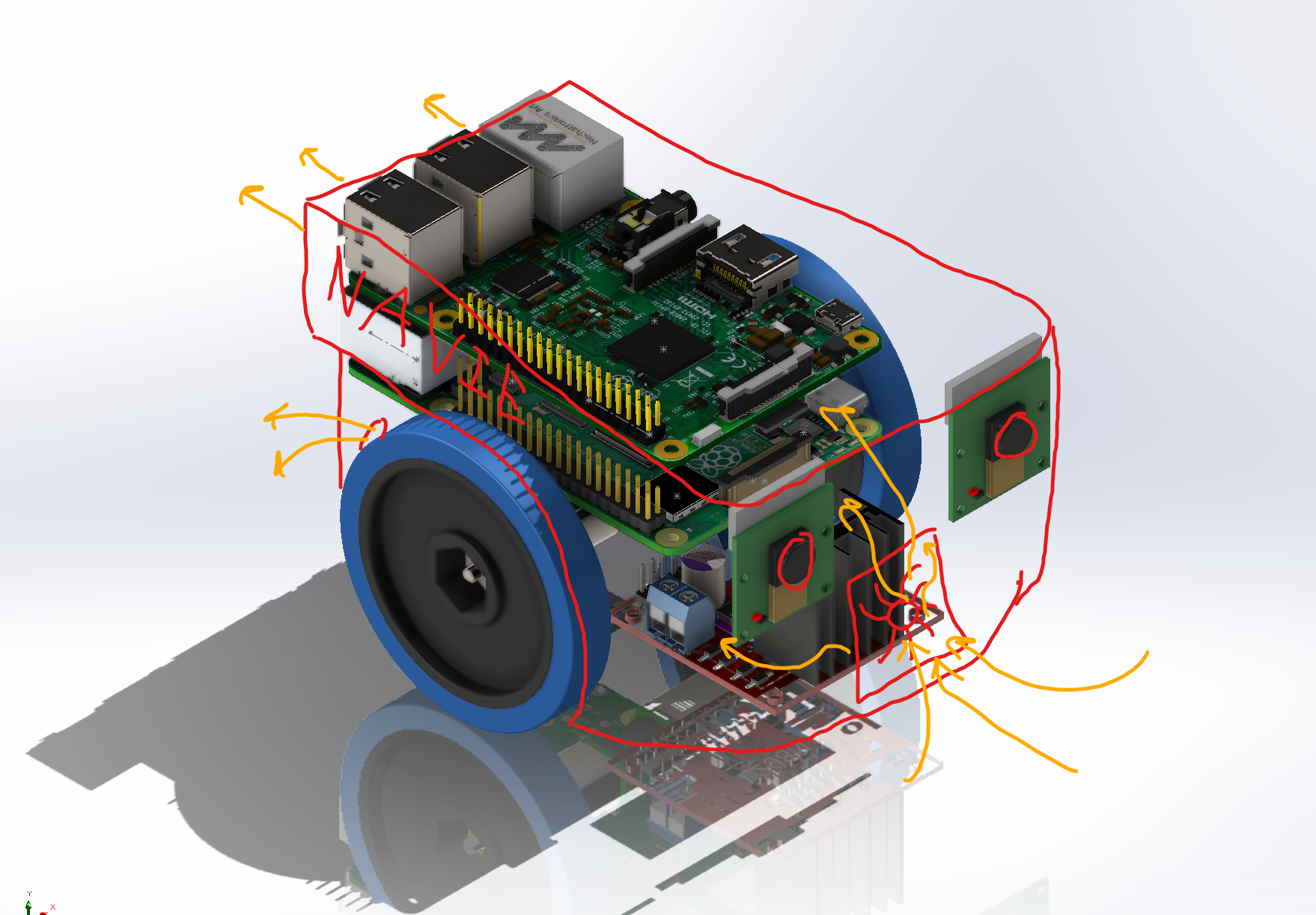
Navie is a project that was designed to help improve my skills with C programming on raspberry pi, as well as gain a better understanding of SLAM and robot navigation in general. The project is currently considered blocked. I ran into a problem implementing the dead-reckoning where the encoder on the motors I purchased were not working to spec. I plan to pick this project back up once the BLDC project has been completed.
Appendix · Details & links
| MCU | Rasbperry Pi 4 (x2) |
| Languages | C |
| CAD Program | Solidworks |
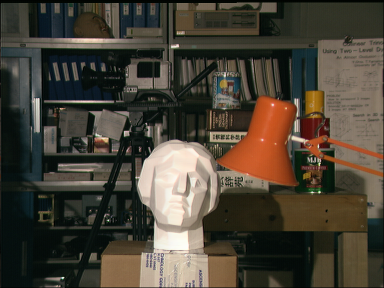
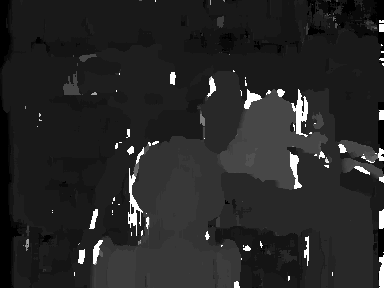
| Technologies | Embedded · WiFi · Robotics · 2D SLAM · Particle Filter · Monte-Carlo · Block matching · Stereo Depth Processing |
Gallery