Sodium Mini-Robots (Na)
A mini-robotics research project, intended to be a smaller Navie, hence Na (Sodium).
About the project
Sodium 1 (Na 1) was developed first, as an experiment to see how small a robot I could make, and what tradeoffs that size would come with. The robot is able to drive around using a touch joystick on a webpage, and recharges using USB-C. Na 1 suffered from a bad mechanical design, that was entirely held together with rubber bands. Its tracks were stolen from a video by Maker's Muse, and worked very well! It also suffered from not having a WiFi antenna, which limited its effective range to just a few feet. Other intermittent electrical problems plagued the device, which lead to the creation of Na 2.

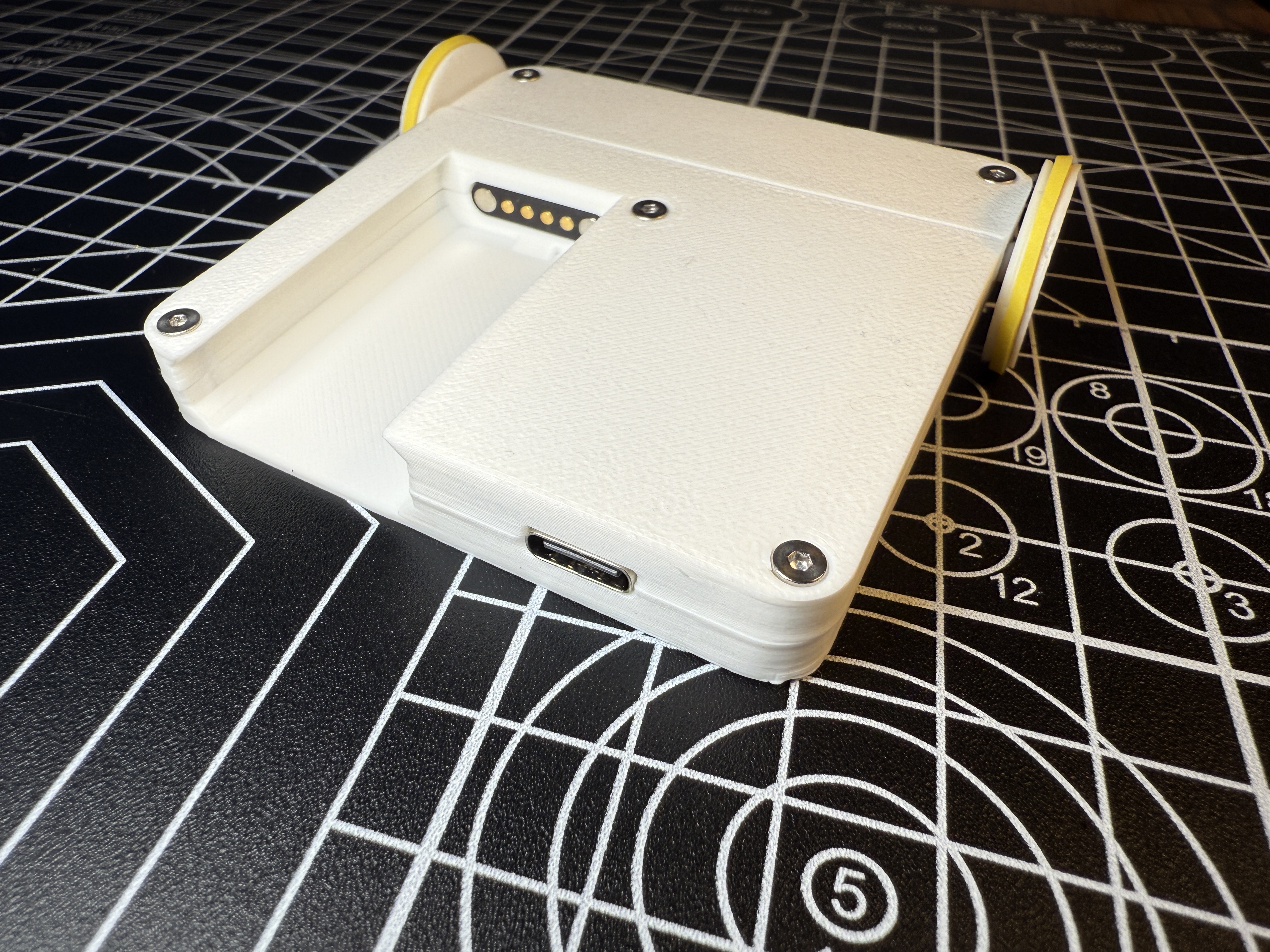
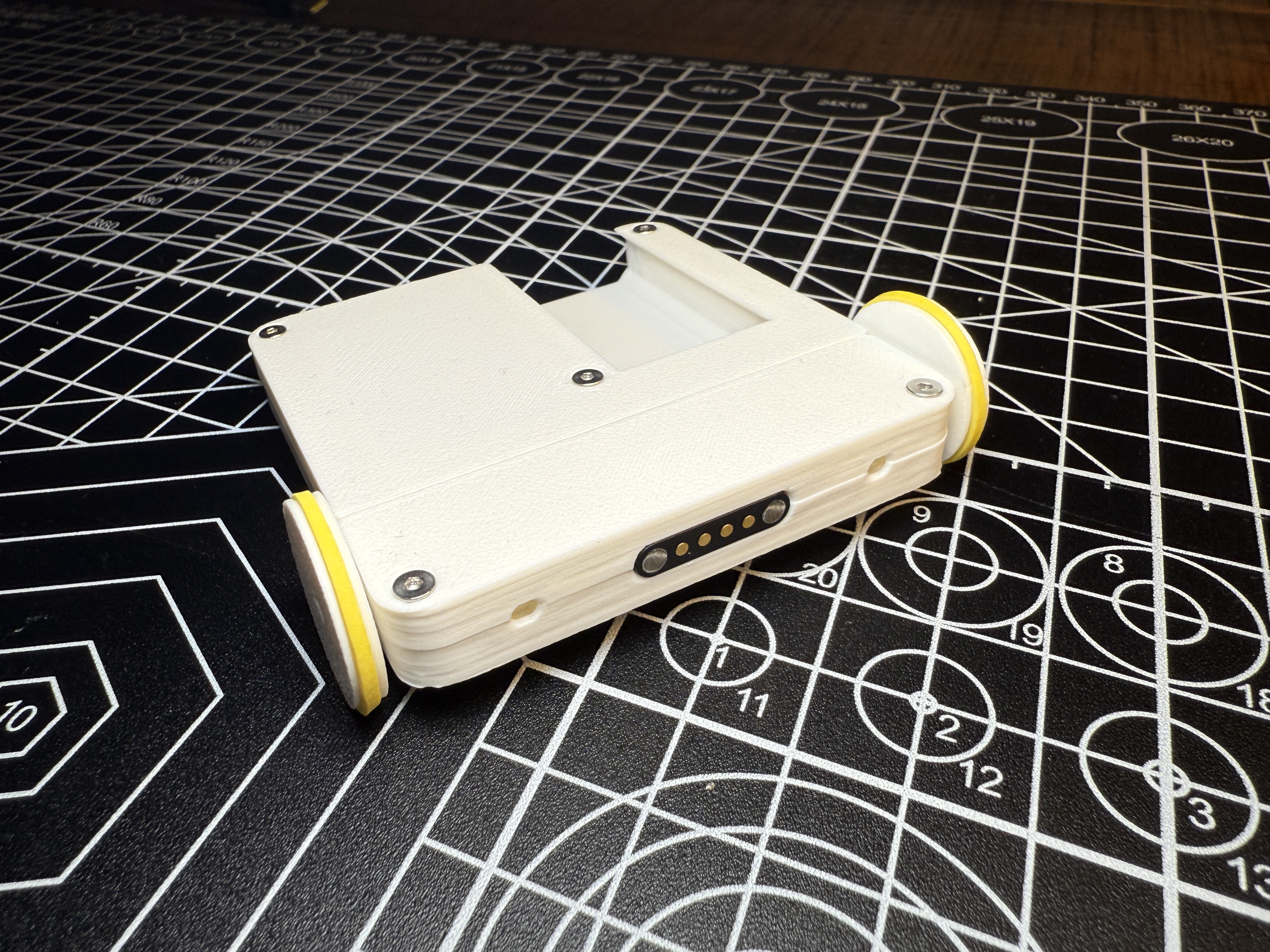
Na 2 was a significant leap forward in mechanical design. Its modular structure allows you to access the motors with just 2 screws, or replace the battery with a tug on the magnetic connector. It also charges over USB-C, but ditches the 5v drive system in favor of the 3v system the xiao esp32c3 supports natively. It also ditches the bearings for a much more simple drive system.
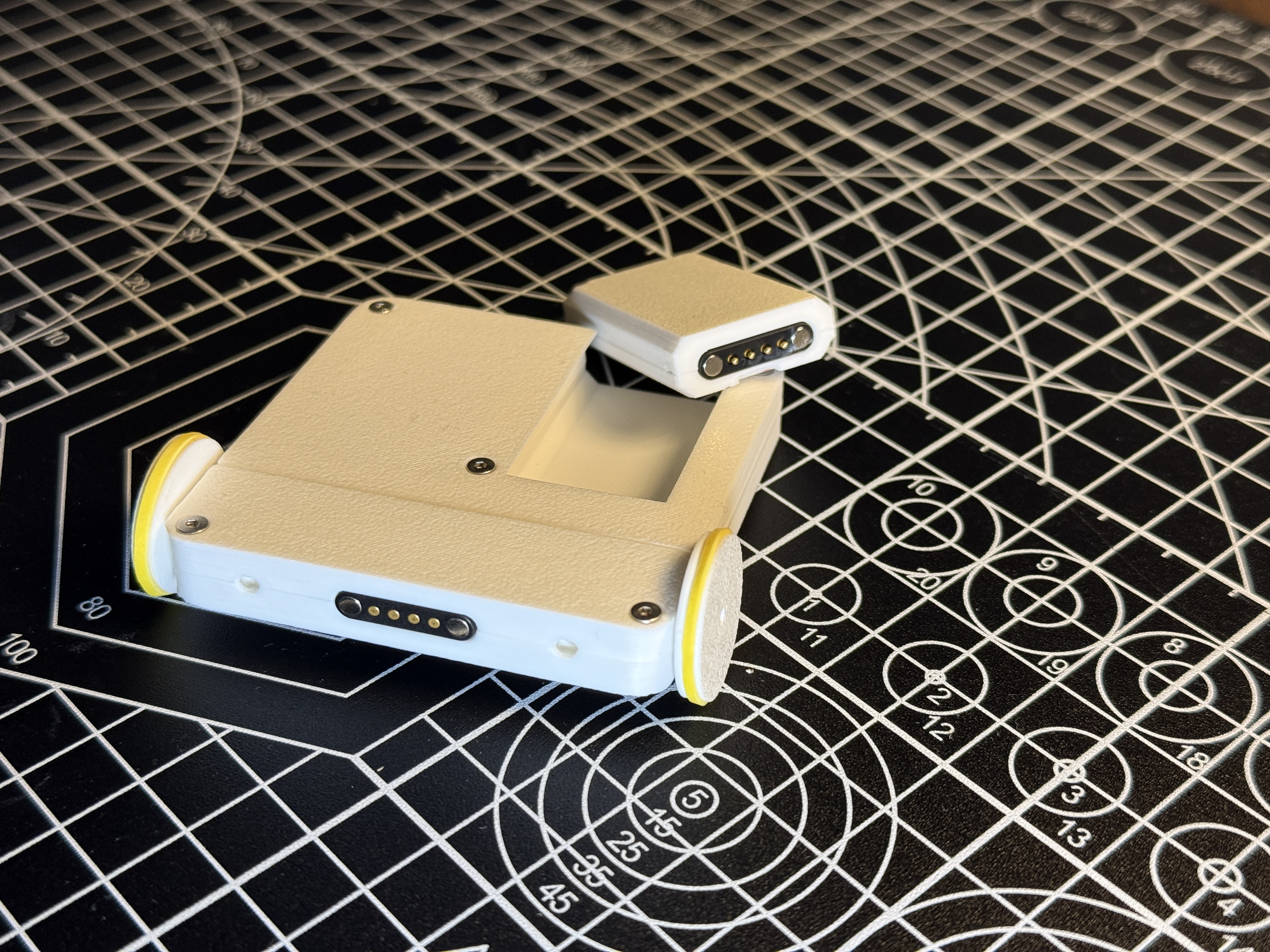
Na 2 was too far a correction from the mistakes of Na 1. Its mechanical build and design was a huge success, but its drive system suffered to the point of unusably. The learnings from this robot heavily influenced the design of Navie 2, which you can read about on the Navie 2 page!
| MCU | Xiao ESP32-C3 |
| Languages | Arduino-C |
| CAD Program | Onshape |
| Technologies | Embedded · WiFi · Webserver · Robotics |
Gallery